Un motor paso a paso es un tipo de motor eléctrico que realiza movimientos discretos o «pasos» en respuesta a señales eléctricas. Cada paso corresponde a un ángulo específico de rotación. Estos motores son ampliamente utilizados en aplicaciones que requieren un posicionamiento preciso, como impresoras 3D, máquinas CNC, robots, etc.
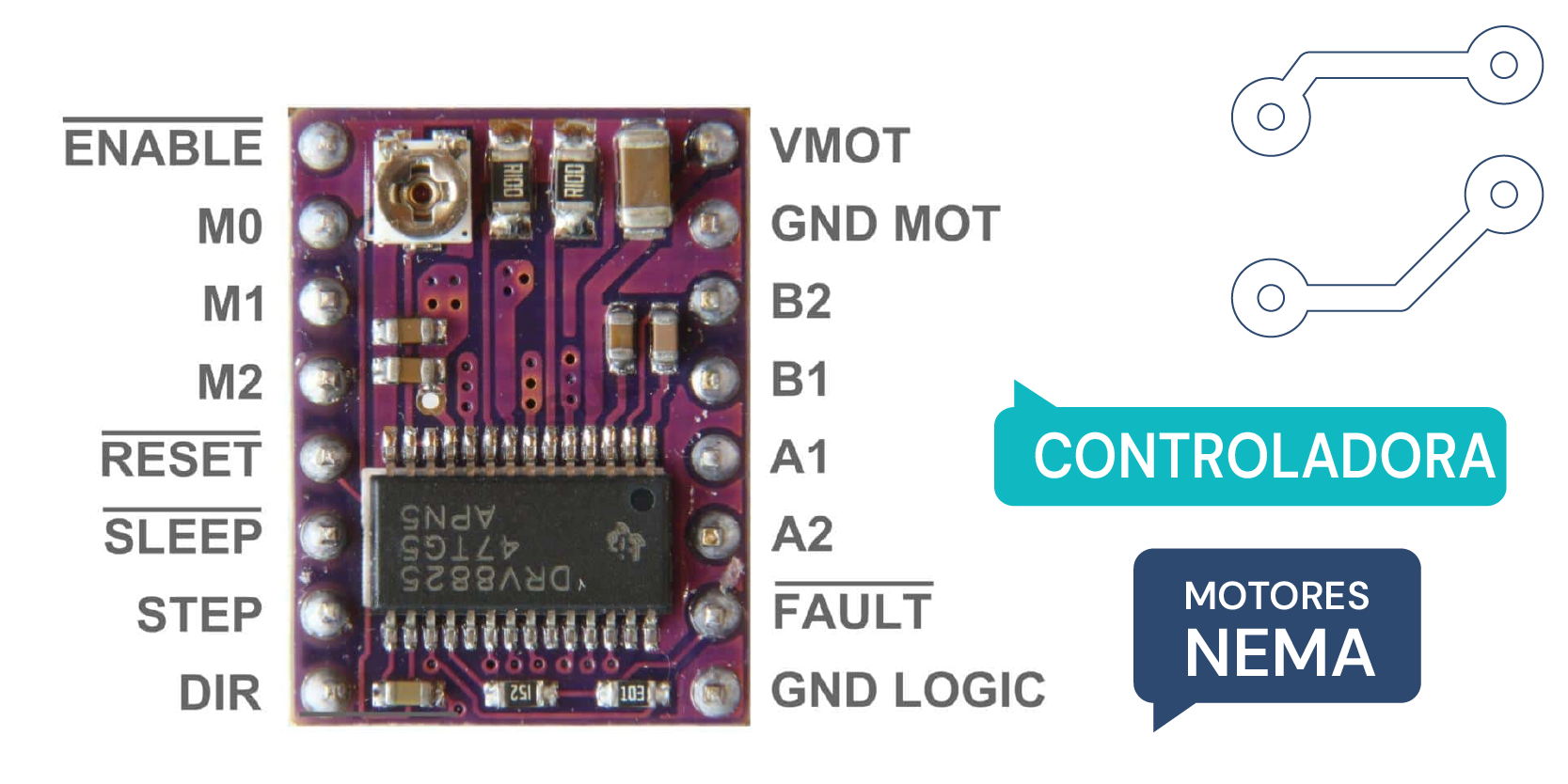
El DRV8826 es un controlador de motor paso a paso que se utiliza para controlar y gestionar la operación de motores paso a paso.
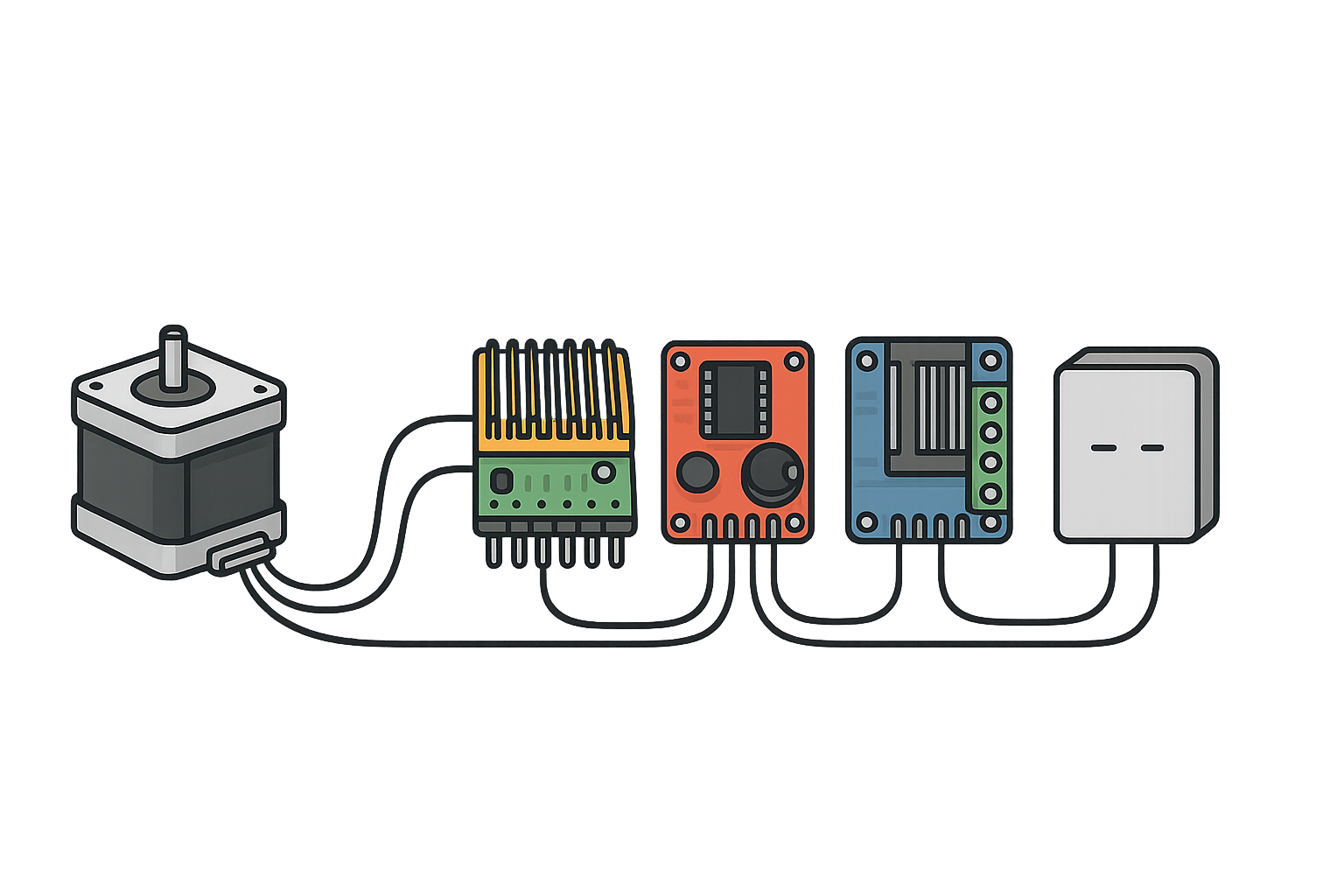
Componentes básicos:
- Motor paso a paso: Este es el componente que realizará el movimiento. Los motores paso a paso tienen un número específico de pasos por revolución.
- Controlador de motor paso a paso (por ejemplo, DRV8826): Este componente se encarga de recibir las señales de control y alimentar el motor paso a paso de acuerdo con esas señales.
- Microcontrolador o Placa de Desarrollo: Se utiliza para enviar comandos al controlador del motor.
- Fuente de alimentación: Proporciona la energía necesaria para alimentar tanto el controlador como el motor.
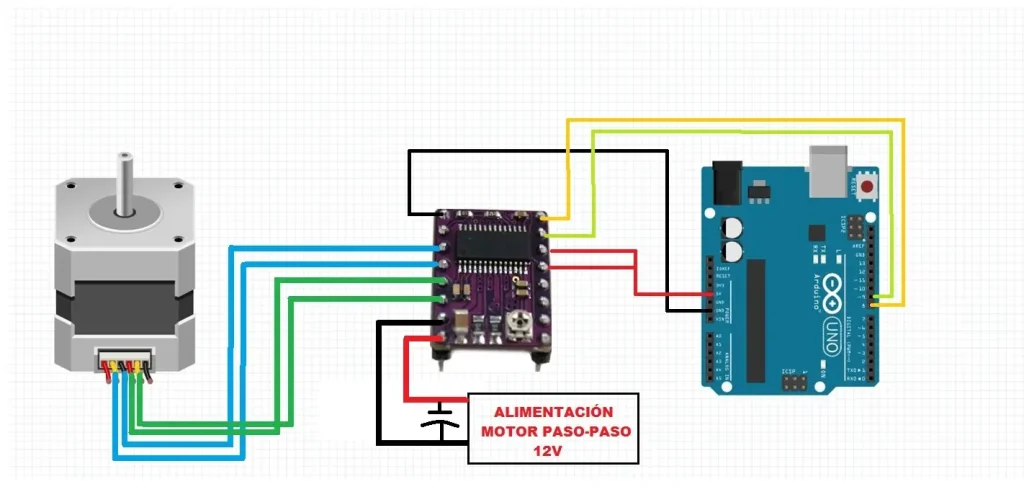
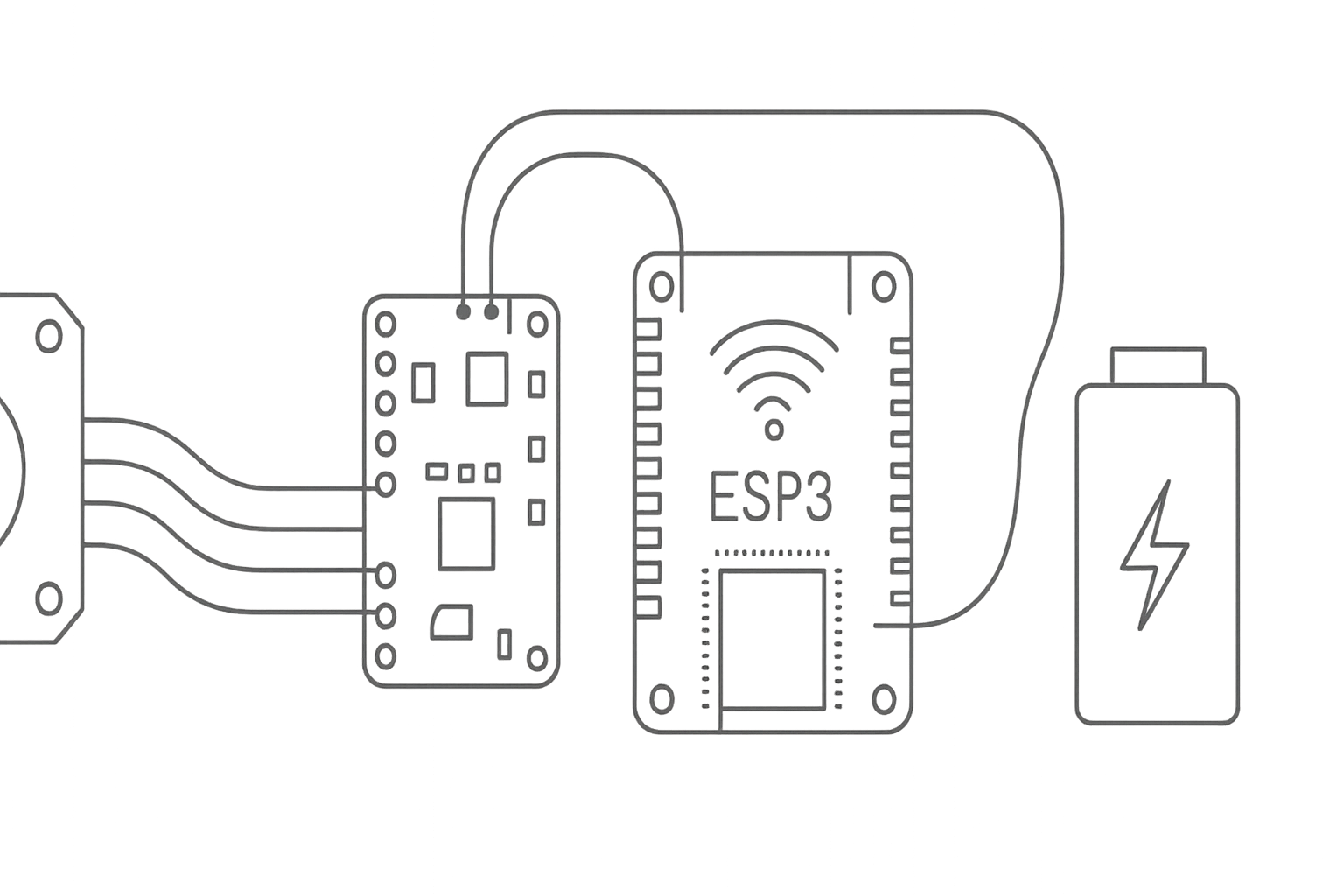
Conexiones básicas:
- Conectar el motor al controlador: Conecta las bobinas del motor a las salidas del controlador. Asegúrate de seguir la secuencia correcta para las bobinas.
- Conectar el controlador al microcontrolador: Conecta los pines de control (pasos, dirección, etc.) del controlador al microcontrolador.
- Conectar la fuente de alimentación: Asegúrate de que tanto el controlador como el motor reciban la alimentación necesaria.
Configuración y código (ejemplo para compilar con IDE de desarrollo):
- Se definen los pines de control (
stepPinydirPin). - En el bucle principal (
loop), se establece la dirección del movimiento, y luego se realizan 200 pasos en esa dirección. - Se espera un segundo antes de cambiar la dirección del movimiento y realizar 200 pasos en la dirección opuesta.
- Se repite este patrón.
// Definir pines de control
const int stepPin = 2;
const int dirPin = 3;
void setup() {
// Configurar pines como salidas
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// Establecer la dirección del movimiento
digitalWrite(dirPin, HIGH); // Cambiar a LOW para invertir la dirección
// Realizar 200 pasos
for (int i = 0; i < 200; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(500); // Ajustar según la velocidad del motor
digitalWrite(stepPin, LOW);
delayMicroseconds(500); // Ajustar según la velocidad del motor
}
// Esperar un segundo
delay(1000);
// Cambiar la dirección del movimiento
digitalWrite(dirPin, LOW);
// Realizar 200 pasos en la dirección opuesta
for (int i = 0; i < 200; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(500); // Ajustar según la velocidad del motor
digitalWrite(stepPin, LOW);
delayMicroseconds(500); // Ajustar según la velocidad del motor
}
// Esperar un segundo
delay(1000);
}

Deja una respuesta